Clutchable Actuation

The weight and power consumption of wearable devices rapidly scale with the number of independent motors used. Using one motor per Degree of Freedom (DoF) of the human body is, thus, unfeasible. There's a rich and varied literature on the design of underactuated systems, i.e. robots that use a lower number of motors than DoF; these include, among others, differential mechanism, mechanical implementation of kinematic synergies and routing of the driving cables on multi-articular load paths. These approaches impose hard constrains on the kinematics of the wearer, allowing only a finite number of predefined moving patterns.
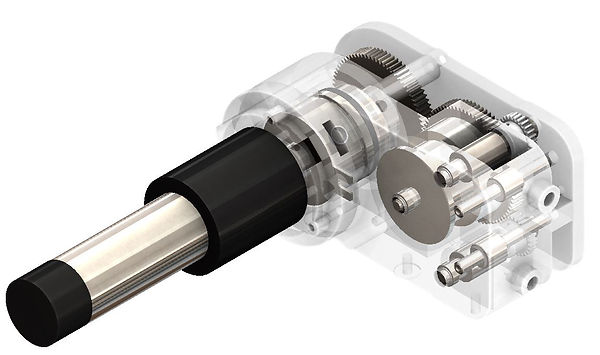
We chose a different approach based on the One To Many (OTM) or uni-drive concept that allows independent control of multiple DoF using the mechanical power generated by a single motor (referred to as prime mover from here onwards). Our solution consists in using n custom-designed modules (shown in Figure 1 ), all driven by the same prime mover rotating at a constant speed, to independently control n DoF of a soft exosuit.
Activating the clutches of each module in a different pattern can be used to independently follow arbitrary trajectories on each DoF .
We have designed an actuator that exploits the OTM concept to independently actuate 2 elbow exosuits using the power generated by a single prime mover.
Publications
Xiloyannis L, Annese E, Canesi M, Kodian A, Bicchi A, Micera S, Ajoudani A, Masia L. "Design and Validation of a Modular One-To-Many Actuator for a Soft Wearable Exosuit". Frontiers on Neurobotics, May 2019, 13.
Marco Canesi, Michele Xiloyannis, Arash Ajoudani, Antonio Bicchi and Lorenzo Masia, "Modular One-to-many Clutchable Actuator for a Soft Elbow Exosuit", International Conference on Rehabilitation Robotics, London, 2017.